CULET is a robot capable of emulate the behaviour of any 2-symbol Turing
machine. It is built with Cubelets extended with Lego
This page contains some examples of Turing machines implemented in CULET, a list of the materials for build CULET, links to the code of the reprogrammed cubes and some photographs of CULET.
A machine that emulates the evolution of Rule 110 elementary celular
automata. This machine is proved to be
A machine that duplicates the number of ones at the beginning of the
execution. This machine is described
The main program run in the rotator cube. Here is the C++ program for producing the code that must be programmed in this cube. The output depends on the Turing Machine that is going to be implemented: here is the input for producing the ECA rule 110 emulator, and here is the one for the duplicator machine. The C programs produced, respectively, are this and this.
Additionally, the motors and the flashlight needs too custom programs: this is the one of the motors, and this the one of the flashlight.
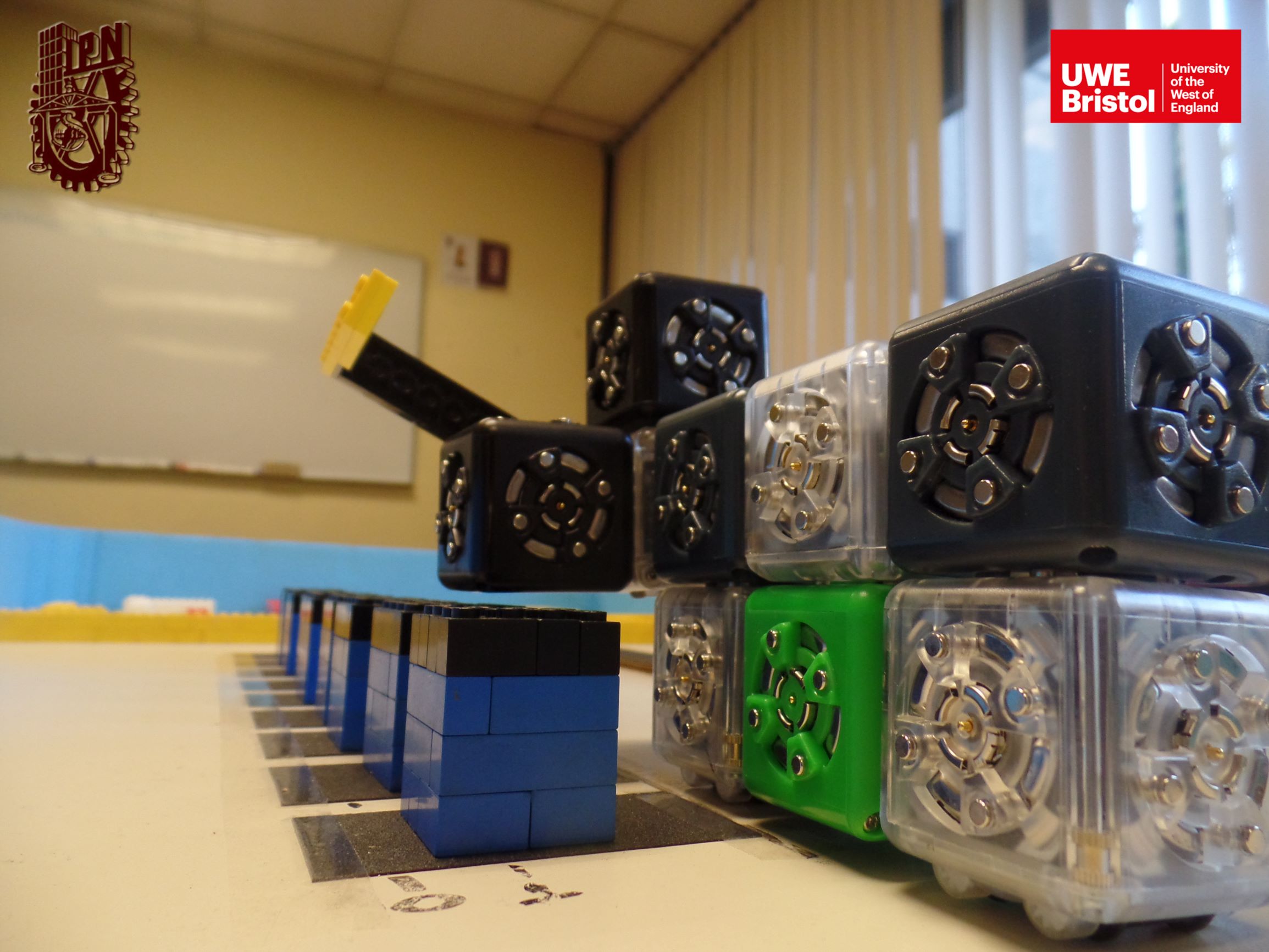
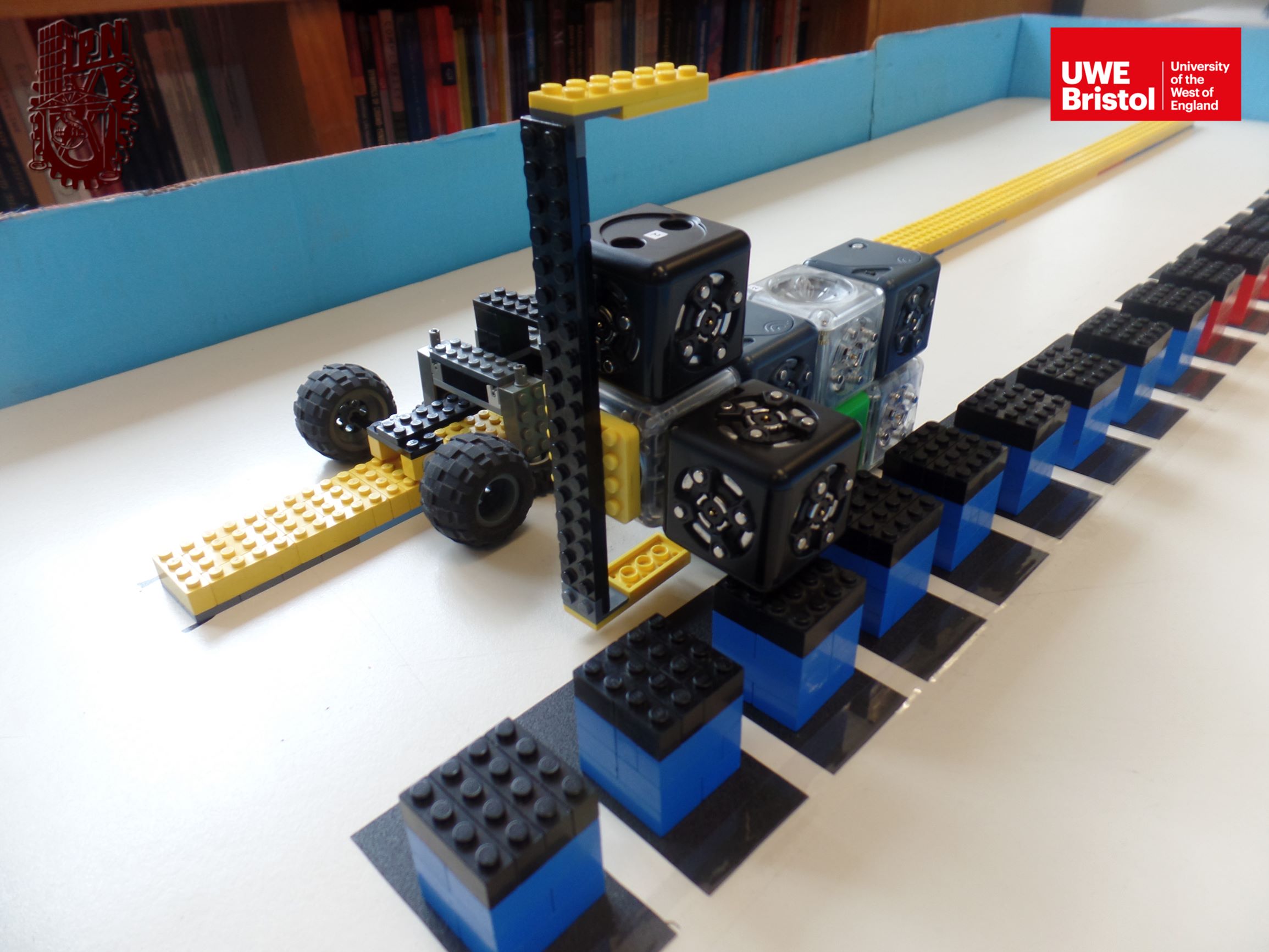
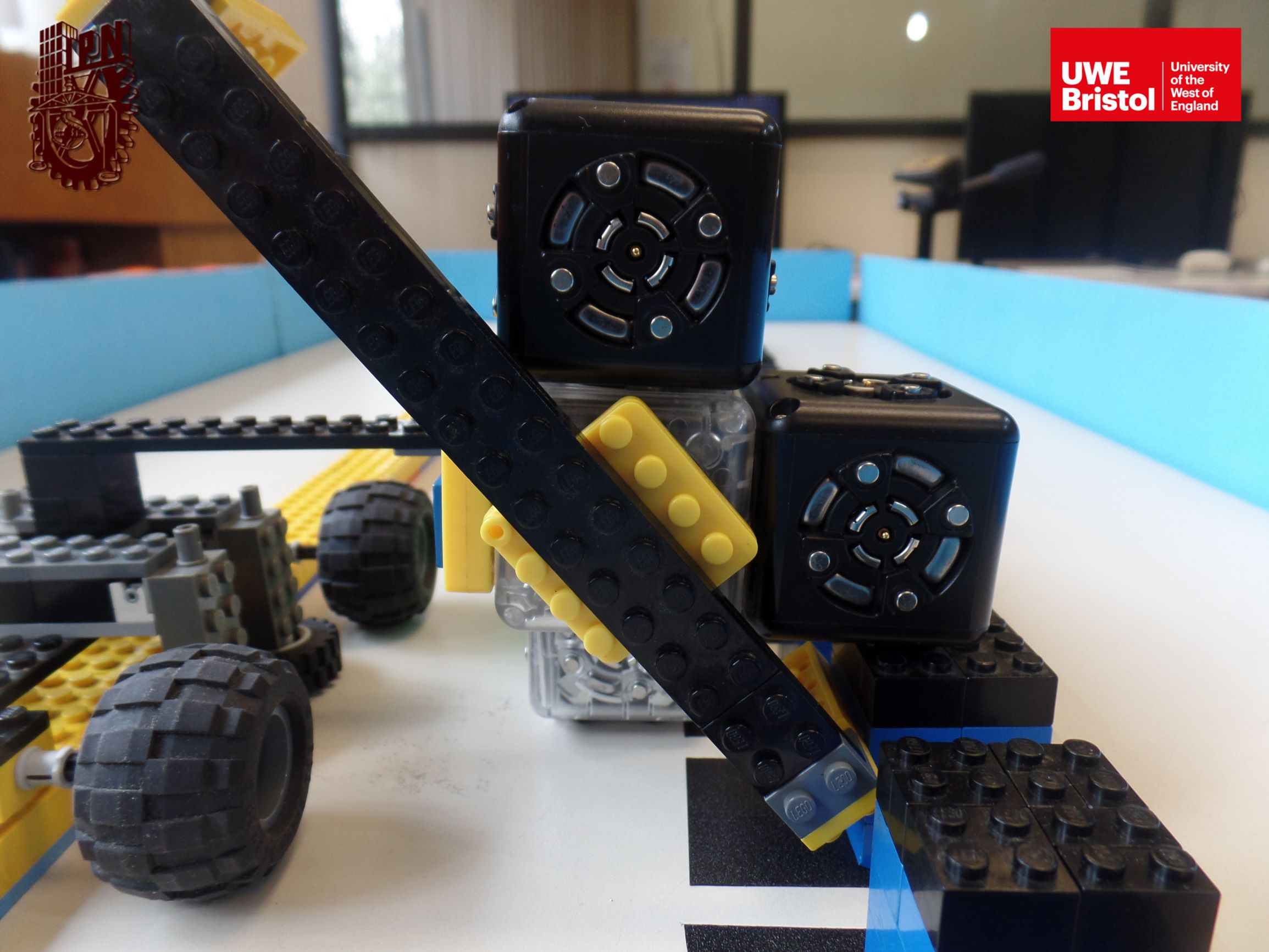
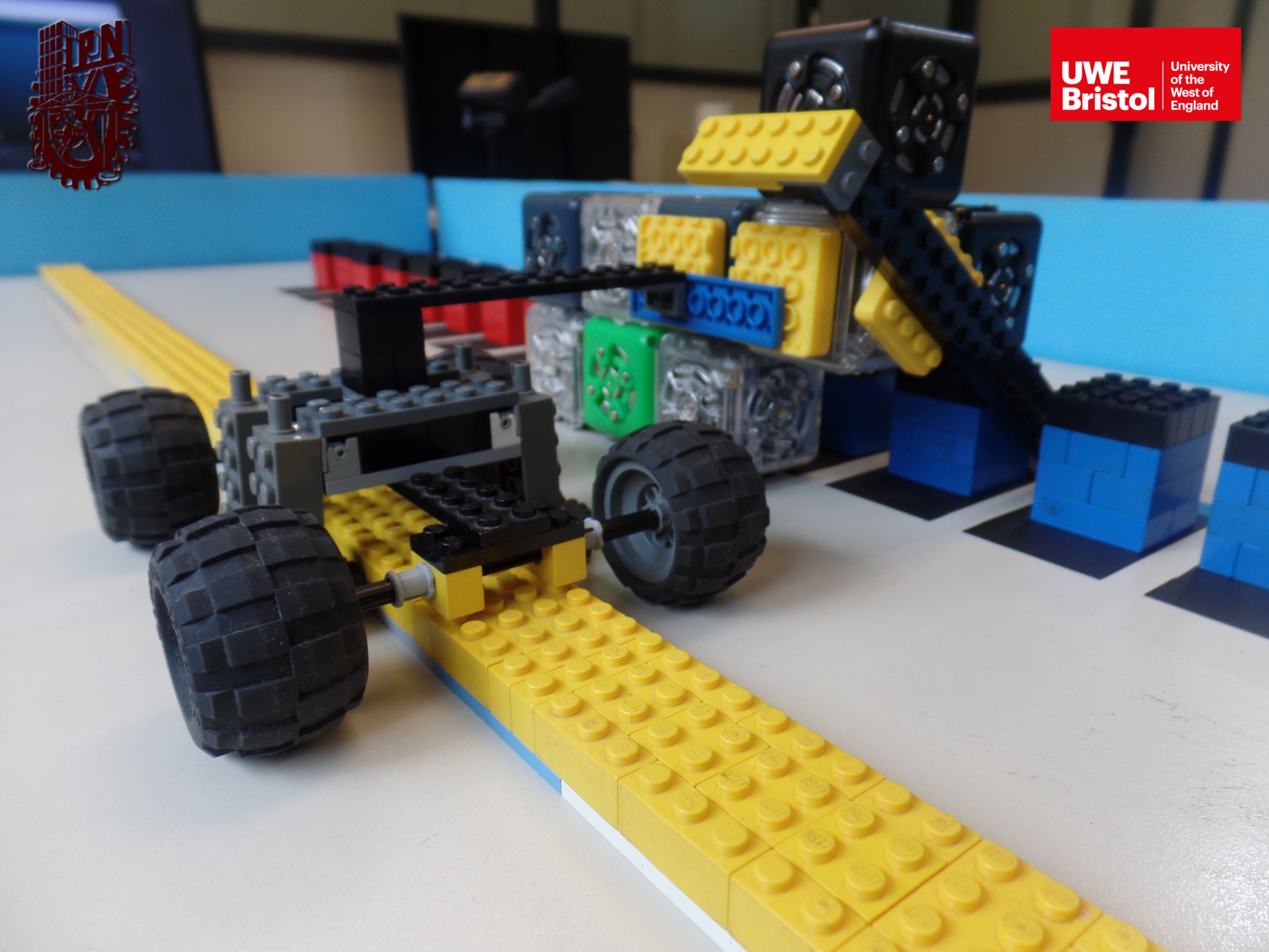
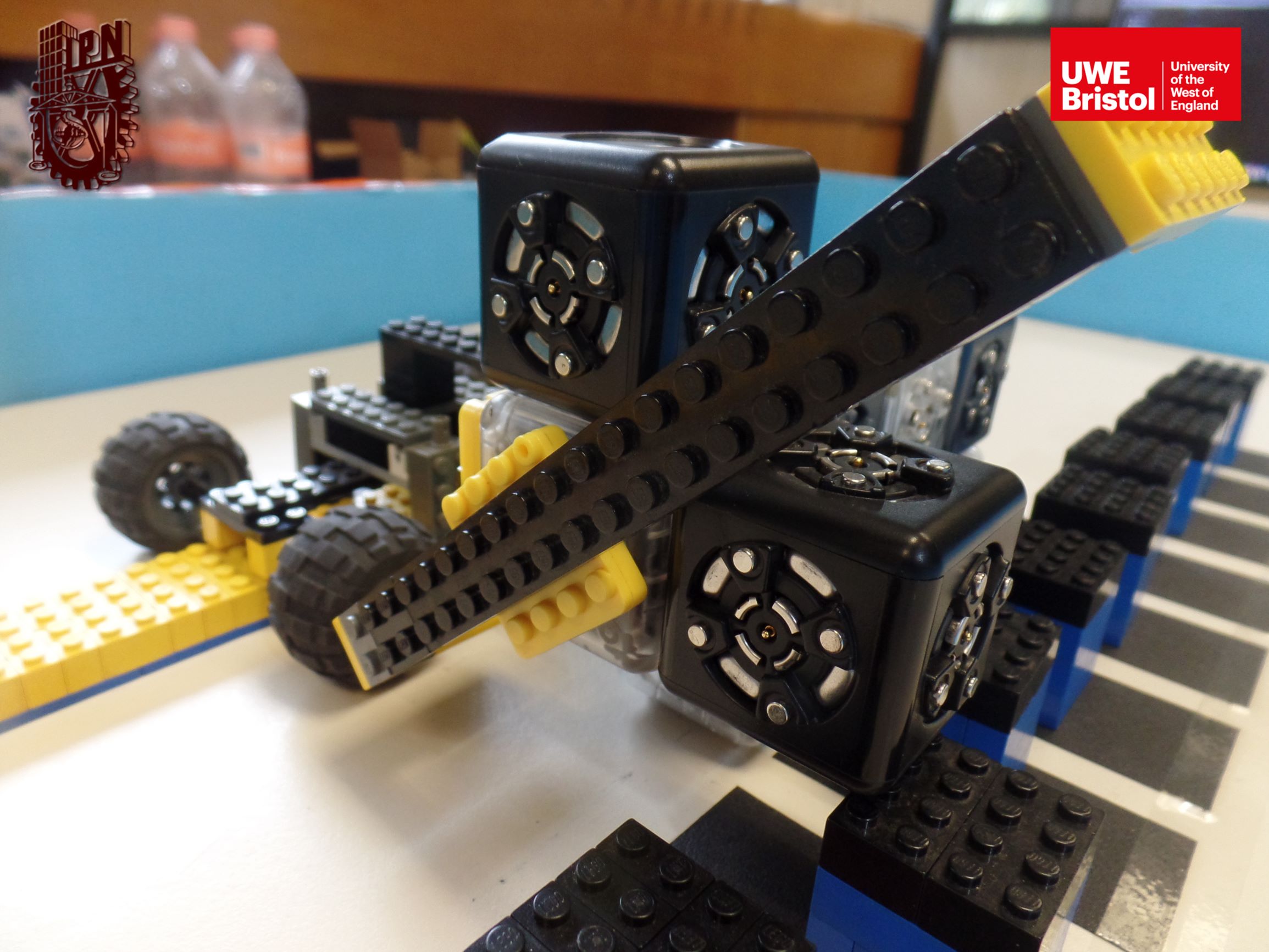
The idea of this section is to show a closer look of some of the details of CULET.






One of the early models of CULET was like this logic gates: the idea was use the flashlights and the distance sensors as cells.
A participation in the 2019 edition of the ICAROB: the International
Conference on Artificial Life and Robotics, in Beppu, Oita,
Japan.
A presentation in the event
60 years of computing in Mexico and the influence of Harold V.
McIntosh, in
A presentation in the first seminar of artificial life and robotics, in
An entry in the Engineering our Future blog, at UWE.
This work is a collaborative project between the Artificial Life Robotics Lab (ALIROB), at the National Polytechnic Institute, in Mexico, and the Unconventional Computing Lab (UCL), at the University of the West of England.
Ricardo Q. Figueroa, ALIROB.
Daniel A. Zamorano, ALIROB.
Genaro J. Martínez, ALIROB, UCL.
Andrew Adamazky, UCL.
[Ren16] Paul W. Rendell. Turing Machine Universality of the Game of Life. Springer, 2016. https://www.springer.com
[Coo04] Matthew Cook. Universality in Elementary Cellular Automata. In: Complex Systems 15.1 (2004). https://www.complex-systems.com
Copyright © 2018 ALIROB